

众擎全新通用人形机器人

行稳致远 「众」行无疆

点击播放

170cm
成年人等身大小
2m/s
常态行走速度
55kg
整机净重
Intel RealSense
D435
D435
深度相机
2CPUs
内置NVIDIA、Intel
双核处理器
双核处理器
10years
机身采用航空级铝材,
使用寿命
使用寿命
32pcs
全身自由度,核心关节
均自主研发
均自主研发
2hrs
电池续航

Engine Sense
视听感知系统
视听感知系统
360°
激光雷达
6颗
高清摄像头
融合感知,实现全景无盲区
3D感知避障导航
采用多层规划算法,自动选
择最优路径,支持全身不同
宽度的联合规划与避障
择最优路径,支持全身不同
宽度的联合规划与避障

仿生灵巧手
单手具备6个自由度,
自如应对复杂场景
自如应对复杂场景
精准双臂控制
单臂具备4自由度:
肩部谐波关节*3、肘部谐波关节*1
机械双臂采用绳驱动柔性力控方案,
每个动作都能准确可靠地执行
肩部谐波关节*3、肘部谐波关节*1
机械双臂采用绳驱动柔性力控方案,
每个动作都能准确可靠地执行

核心关节自研
实现精准力控
行星准直驱关节、谐波力控关节
和滚珠丝杠直线关节等高性能部
件均为团队成员自主研发
和滚珠丝杠直线关节等高性能部
件均为团队成员自主研发

186N·m
膝关节最大扭矩

0.2N·m
动力关节力控精度可达

毫米级
运动算法控制
全身运动控制算法
实现稳定流畅动作
复杂动作,游刃有余
俯卧撑
深蹲
转弯行走
AI加速模拟,自主强化学习

全新一代
拟人ID设计
拟人ID设计
人类化构型
仿人环视双目
环绕立体扬声
模仿真人出声方向
仿人环视双目
环绕立体扬声
模仿真人出声方向

航空级
铝材机身
铝材机身
使用寿命可达10年

大容量快拆电池
10000mAh
2小时续航
2小时续航
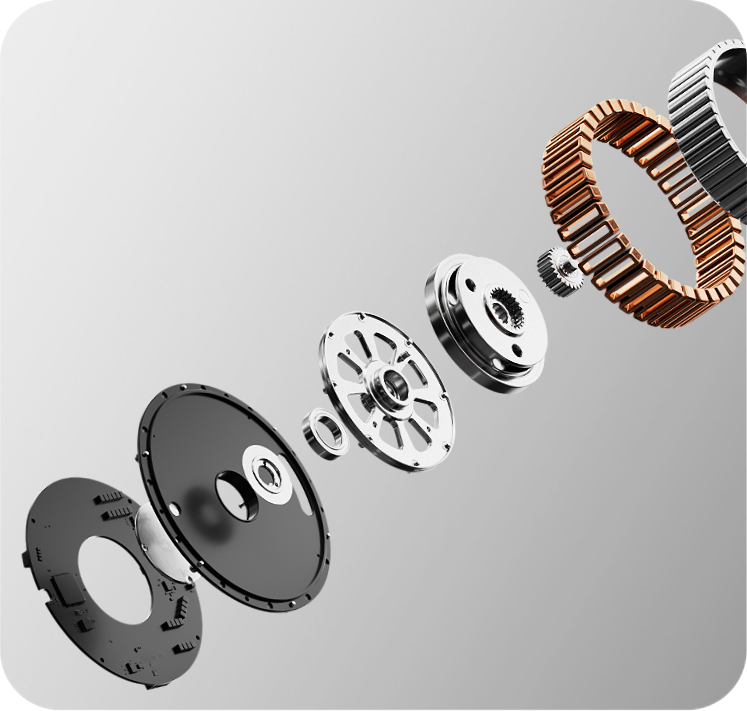
全栈式自研关节
一体化谐波关节模组
动力关节力控精度达0.2N·m
动力关节力控精度达0.2N·m

基于强化学习
的运动控制
的运动控制
利用神经网络方式
解决自然步态算法
轻盈步态
行稳致远
解决自然步态算法
轻盈步态
行稳致远

机械与结构美学
170cm 55kg
等比通用人形智能体
中空走线关节设计
全谐波力控设计
等比通用人形智能体
中空走线关节设计
全谐波力控设计

核心参数
RGBD*1
扬声器*2
MIC阵列
RGBD*1
RGBD*1
运控IMU传感器


急停按钮
电量灯
电源开关
千兆网口/USB3.0
高精度力控传感器
尺寸
1700mmx520mmx270mm
总重量
约55kg+
总自由度
32
单腿自由度
6(髋关节3+膝关节1+踝关节2)
单手臂自由度
4(肩关节3+肘关节1)
单手自由度
6
关节输出轴承
工业级交叉滚子轴承
关节电机
低惯量高速内转子永磁同步电机
膝关节最大扭矩
186Nm
小腿+大腿长度
0.8M
手臂臂展
0.65m
关节运动空间
肩关节:P-180°~+60°
肘关节:P 0~+135°
膝关节:-10°~120°
髋关节:P±68°、R-10~+30°、Y±45°
腕关节:P±92.5°、Y±92.5°
肘关节:P 0~+135°
膝关节:-10°~120°
髋关节:P±68°、R-10~+30°、Y±45°
腕关节:P±92.5°、Y±92.5°
关节中空内走线
有
关节编码器
双编码器
散热系统
局部风冷散热
供电方式
13串锂电池
基础算力
4核高性能CPU Intel N92
感知传感器
深度相机(Intel RealSense D435)
扬声器
3W功率
WiFi/蓝牙
无,可自行扩展
高算力模组
NVIDIA Jetson Orin Nano
智能快拆电池
10000mAh
充电器
54.6V 5A
续航时间
约2h
运动能力
2m/s
特别说明:
*画面渲染创意,仅做展示功能使用,并不代表机器人所搭载的UI和具体功能的标准,
详情请后续留意我司官方,以最终实际交付机器人情况为准。
*如无特殊备注,以上页面中所示数据均为我司数据,仅供参考。
实际数据把受使用环境、设备状况、软件版本等因素影响将路有差异,请以实际数据为准。
[1]全谐波工业设计不是指全身使用谐波关节,而是指单腿或单臂使用谐波关节。
详情请后续留意我司官方,以最终实际交付机器人情况为准。
*如无特殊备注,以上页面中所示数据均为我司数据,仅供参考。
实际数据把受使用环境、设备状况、软件版本等因素影响将路有差异,请以实际数据为准。
[1]全谐波工业设计不是指全身使用谐波关节,而是指单腿或单臂使用谐波关节。

关闭